Angular Momentum Conservation:Spinning and Rolling
Items from Lab Kit Needed:
Piece of PVC Tube (Hollow Cylinder)
Piece of Wooden Dowel (Solid Cylinder)
Brightly Colored Tape
Ruler
In this lab, you will study some aspects of the motion shown the video above. In particular, we are interested in whether angular momentum and rotational kinetic energy are conserved through the transition from spinning and rolling to just rolling.
Theory
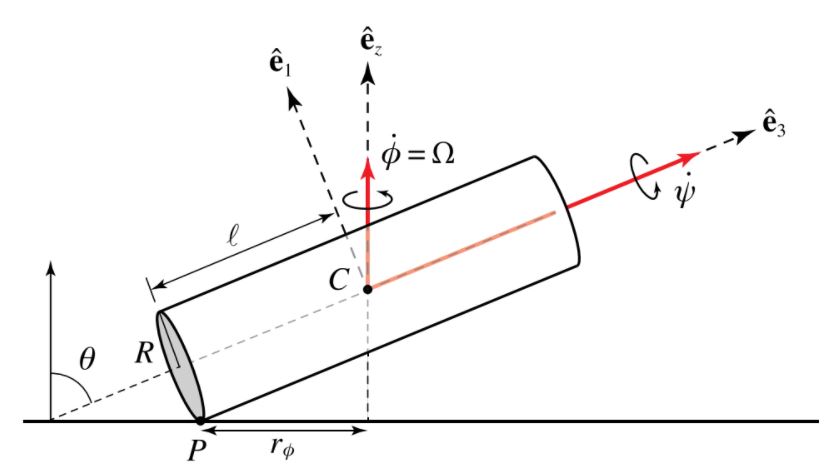
Fig.1 - From Jackson et al., Am. J. Phys., Feb. 2019
When a cylindrical object is spun as shown in the video, it actually also rolls without slipping on one edge. The figure above depicts a side view of this situation. Its motion has a lot of similarities to the precessing top discussed in lecture so please bear that in mind.
The important parameters are:
: radius of cylinder
: half of the length of the cylinder
: rate of rotation (angular velocity) about -axis.
: rate of rotation about the cylinder's main principal axis.
: Unit vector in the direction. Same as .
: Unit vector in the plane of the cylinder's perpendicular principal axis.
: Unit vector in the direction of the cylinder's main principal axis (along its length).
: The part of the cylinder half-length that is parallel to the ground.
: The angle that the cylinder makes with the vertical (measures how tipped over it is).
Since the edge of the cylinder traces out a circle of radius on the ground while rolling about about its axis, we get
Now, we need to determine . Look at the diagram and try to determine what would be in terms of , and .
We can plug this into the first equation to find
Next, we should find the angular velocity. From the diagram we see that
Try breaking into its and components to rewrite in terms of those unit vectors.
Now use the expression you got for above to get a final form for
To get the angular momentum, should we multiply this angular velocity by a moment of inertia?
In terms of and , what angle does make with the vector? What is this in terms of and ? Similarly, what angle does make with ? Are and in the same direction for this system?
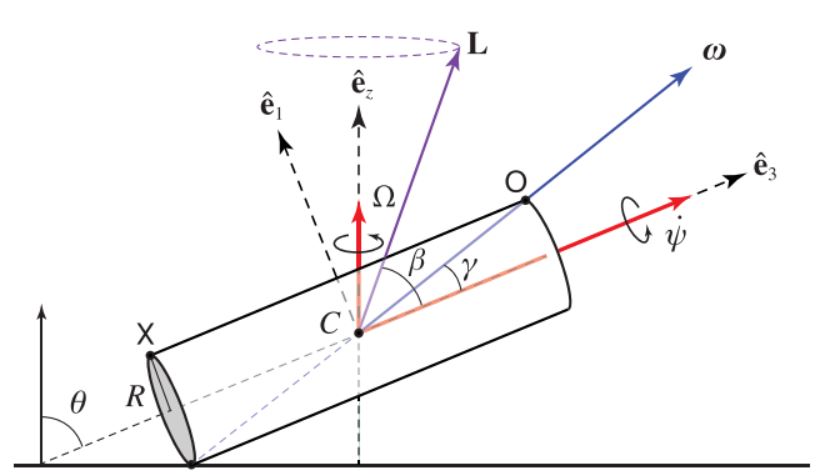
precesses as in the case of a tilted top or gyroscope, but its magnitude should not be significantly changed. In our case the angular momentum is given by
where represents a unit vector in the plane (it is rotating in this plane at a rate ).
Theoretical Questions
What are the expressions for and for (a) a hollow cylinder, (b) a solid cylinder (both of mass , radius , and length ? Think about what simple shapes you can combine to get these, no need for integration.
Find an expression for the magnitude of if (a) and if (b) . Is there a significant difference between the two?
Experiment
Measure the length and diameter of the hollow pvc cylinder.
Set the cylinder spinning using one of the two methods shown in the videos below and record video that includes both the beginning of the spin and the beginning of the roll.
If you use different methods for different trials keep track of which method you used for which trial.
Repeat at least three times using the same spinning method/technique.
Analyze the video in tracker to find both the initial spin rate of the cylinder and the linear velocity while rolling after it has finished spinning. Here is a useful guide on extracting rotational velocity in tracker.
Repeat for the solid cylinder (wooden dowel).
Experimental tips:
I found that the twist method of starting the cylinder allows for more control of where the cylinder stays but it may be a bit difficult to get started compared to the push method. You may have to try repeatedly before you can get a useable video using any method. Don't give up!
I found it useful to define three different point masses in tracker:
One for the center of mass, which should be set as the reference frame as shown in the tutorial video and in the image below.
![]()
One for a point of the cylinder you track as it goes around the center of mass. This can be difficult. Tracking a point on the edge of the cylinder works well. Tracking a point marked with tape doesn't work as well as you might think – for interesting reasons – but give it a try.
One for the cylinder after it has stopped spinning to get the rolling motion separately.
In the end, you should have three tracks looking sort of like the tracks in the images below.
![]()
![]()
Autotracker probably only works for the rolling part of the motion.
Conclusion
What were the ratios for your solid and hollow cylinders?
What were the and moments of inertia for the solid and hollow cylinders? The masses from my kit are: hollow cylinder (11.4 g), solid cylinder (10.8 g).
What were the angles and for the solid and hollow cylinders?
What maximum rates of spin about the -axis did you find?
What were the rotation rates of the cylinder about its main axis while it was rolling?
It turns out that represents the lower stable value of and represents the upper stable value of . Do your observations support conservation of angular momentum through the transition from spinning to rolling for either of these stable tilt angles?
Just before it begins to roll only (as ), there starts to be a problem with our theoretical expression for . What is the problem? What really happens is that . How does the angular momentum (direction and magnitude) just before pure rolling begins compare to the angular momentum just after. How does your experimental angular momentum compare?
Justify your answers to 6.and 7. with data analysis. Remember, to combine or compare different trials, you will have to convert to fractional () or percent change in angular momentum.
Does the method of starting the cylinder spinning seem to affect which tilt angle is a better choice? Is always the best choice? Collaborate with your group if you do not have data on both methods of starting.
Is angular momentum equally well conserved for both the solid and hollow cylinders?
Is kinetic energy conserved across the transition from spinning to rolling? Find the average percent change in kinetic energy. Find a theoretical expression for this change and compare.(Note: as with collisions, you won't be able to compare energy changes directly because it would be difficult to start with the exact same kinetic energy every time. Instead, always make sure to find the fractional or percent change in energy.)
For more details on this experiment see (Jackson et al. 2019)